What I did
Skill : Python, ROS2, CARLA, CasADi ipopt
Keywords : Autonomous Vehicle, Connected Vehicles, Motion Planning, MPC tracking controller, Energy Saving
We have a related project website. The below figures are about our vehicles (IONIQ5, IONIQ Phev)

I am one of the main developer of intergrated systems on the vehicle/simulator. The below figures show our integrated system brifly and the basic architecture.

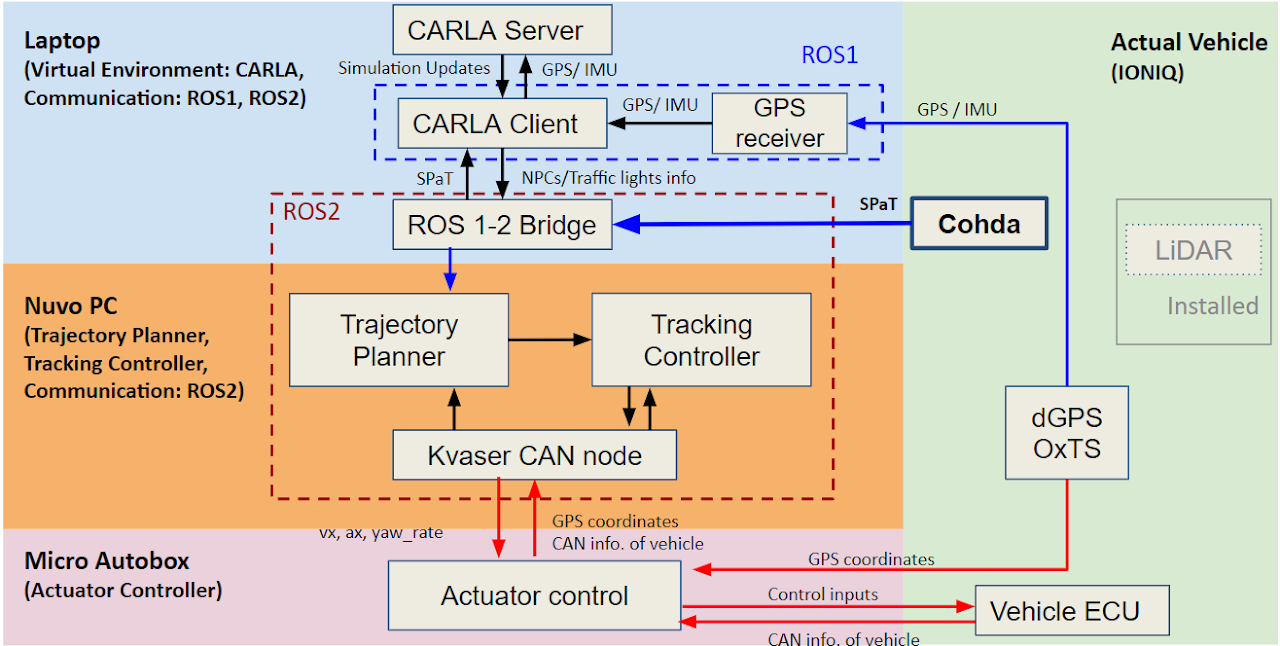
The main goal of this project is 1) to develope the connected autonomous vehicle system with V2X communications and Vehicle-In-the-Loop (VIL) integration 2) to develope energy-efficient driving algorithms with eco-cruise longitudinal trajectory and eco-smart lane change planning.
The simple video of our experiments can be accessed here