What I did
Skill : Python, ROS2, CARLA, CasADi ipopt
Keywords : Autonomous Vehicle, Connected Vehicles, Motion Planning, Stochastic MPC
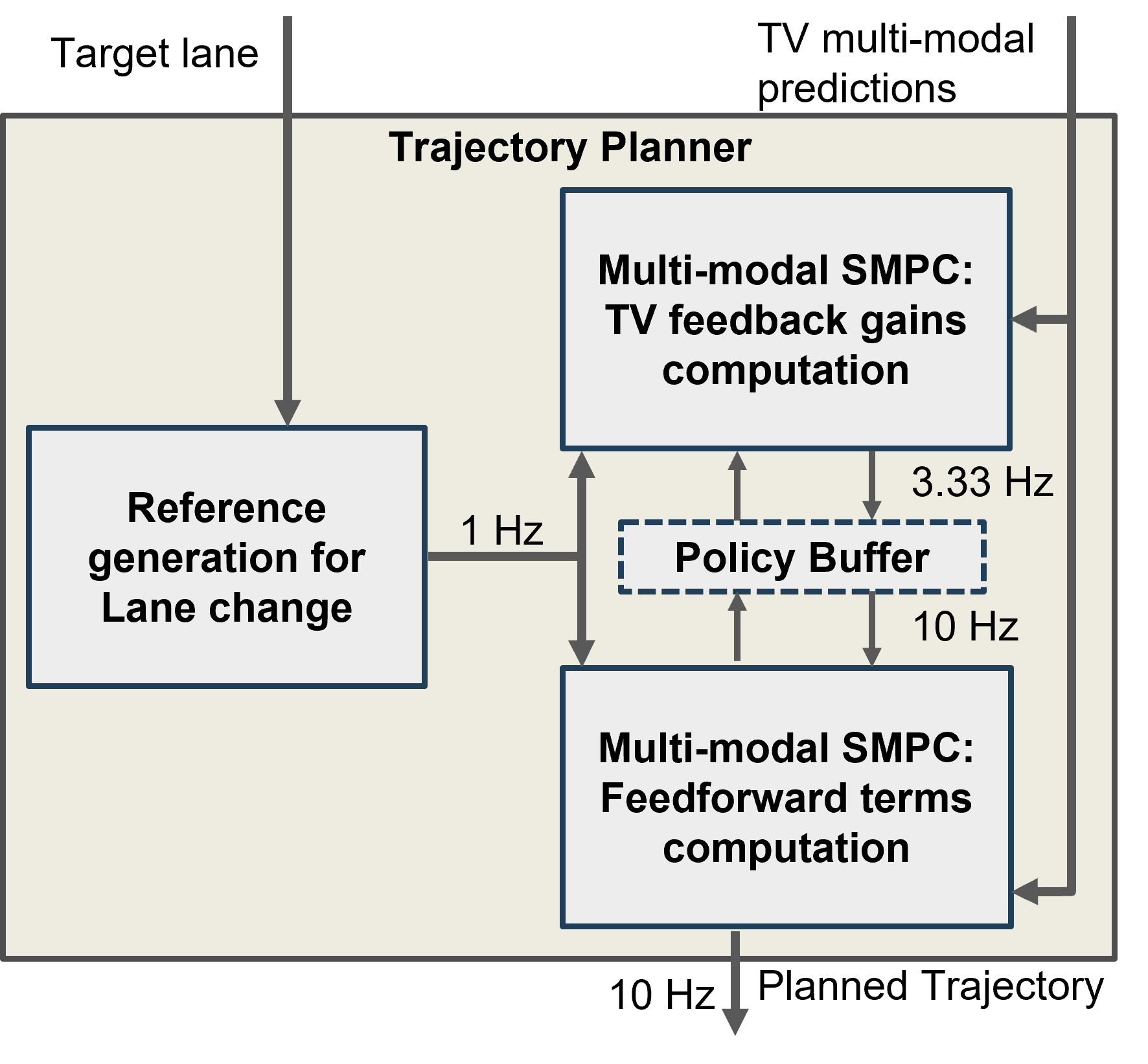
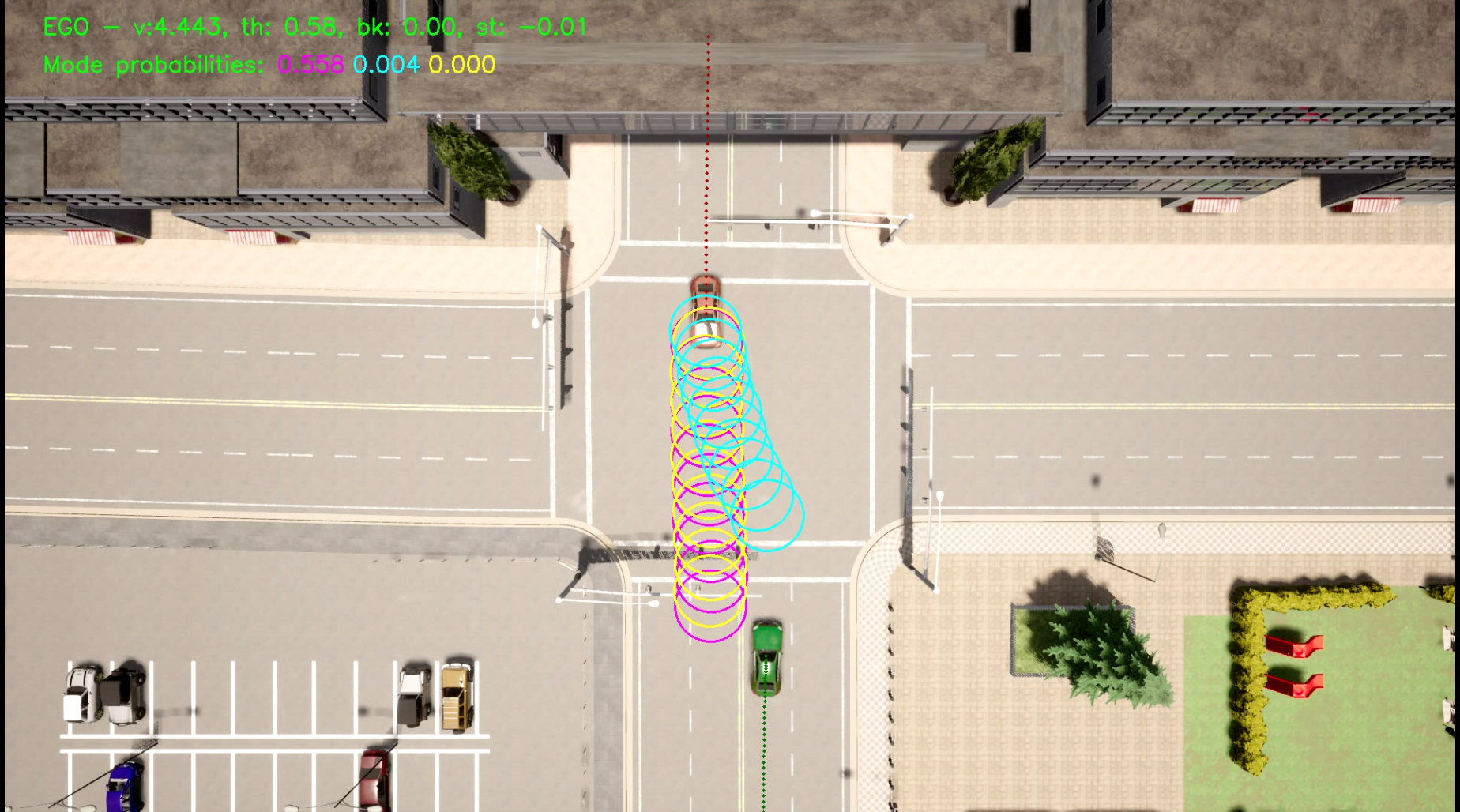
We proposed a Stochastic MPC formulation for autonomous driving with multi-modal predictions of surrounding vehicles. We provide a convex formulation for simultaneously (1) optimizing over parameterized feedback policies and (2) allocating risk levels to each mode for multi-modal chance constraint satisfaction. This enhances the feasibility and closed-loop performance of the SMPC algorithm, as demonstrated by our simulations and hardware experiments.
The experiment videos can be accessed at here
Those are the two scenarios we addressed. (Turn left at the intersection, Lane change)

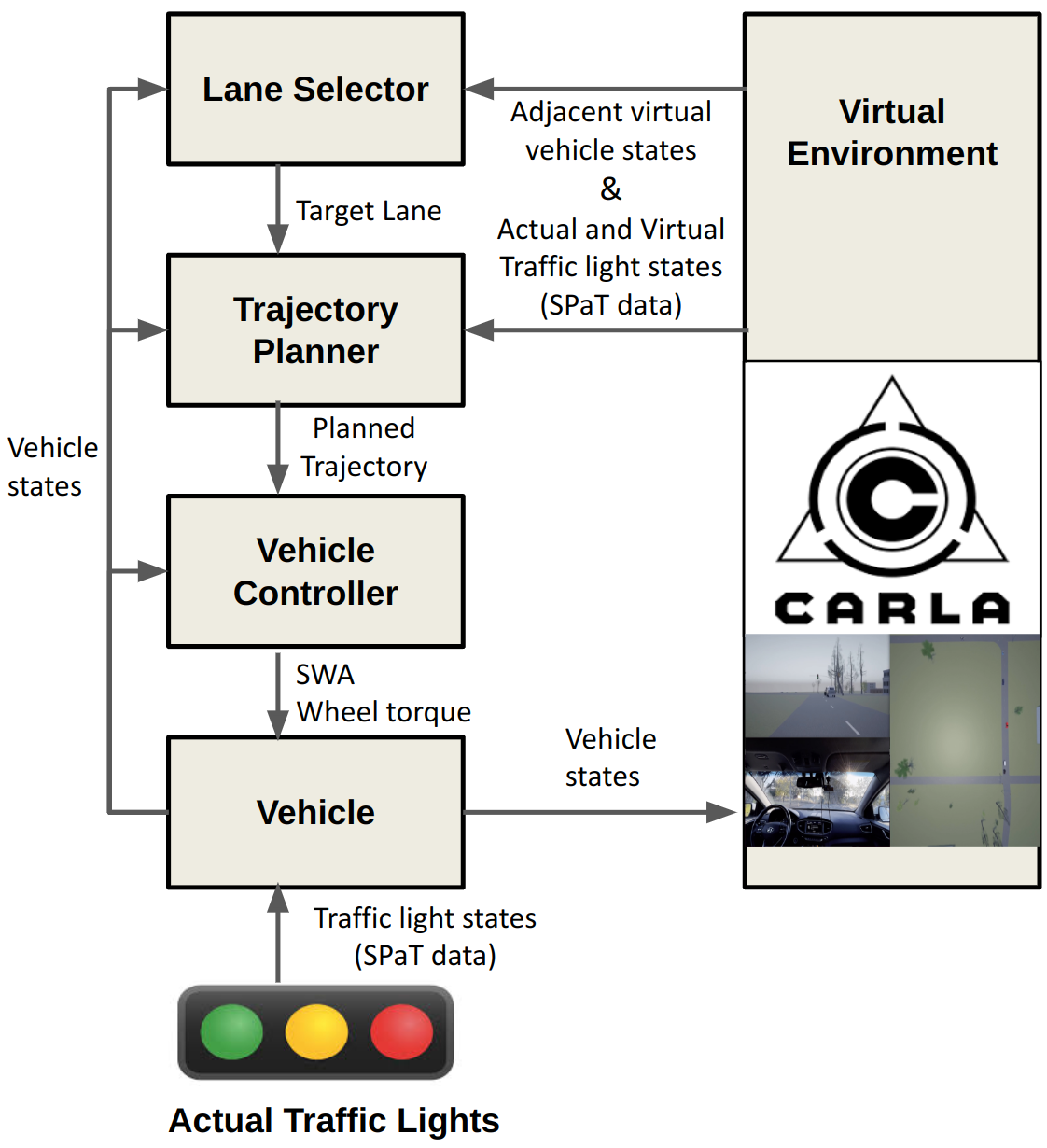
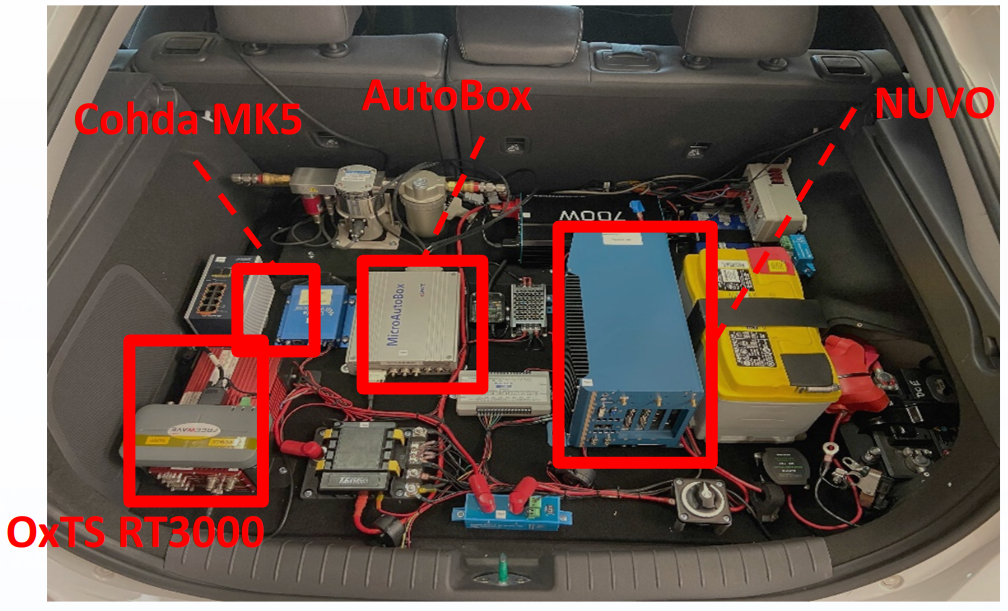
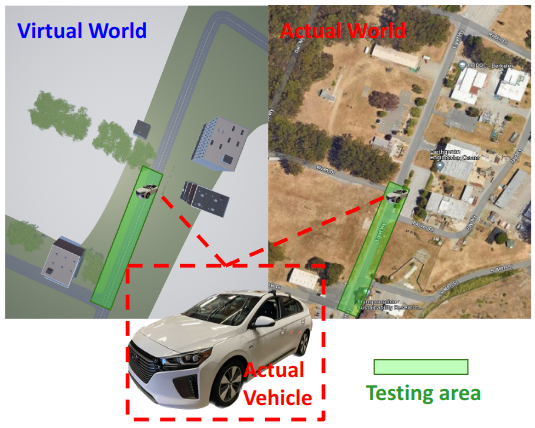
This is our hardware/software setup for vehicle in the loop simulation.
This is our control/planning architecture.