What I did
Skill : Matlab, Simulink, Robotic Toolbox from Peter Corke
Keywords : Computed Torque Control, Robust/Adaptive Passivity based Control, Torque Control, Hybrid force-position control
Sum up
In the graduate lecture named “robot mechanics and control”, I learned the overall robotics dynamics, control and some of optimal control. This lecture required the final project about simulation of robot manipulator controller. The required tasks to ABB IRB 1200-5 manipulator are i) picking up a steel workpiece with cylindrical shape; ii) removing rust by locating the workpiece in front of the mounted laser; and iii) polishing it using a sanding belt. I learned how to simulate the robot’s task as close to reality as possible. I simulated an IRB 1200 manipulator of ABB which can complete various tasks while considering the update frequency and the encoder’s error. Furthermore, I applied a lot of control algorithm such as kinematic control, robust and adaptive control, even hybrid position-force control with some holonomic constraints.
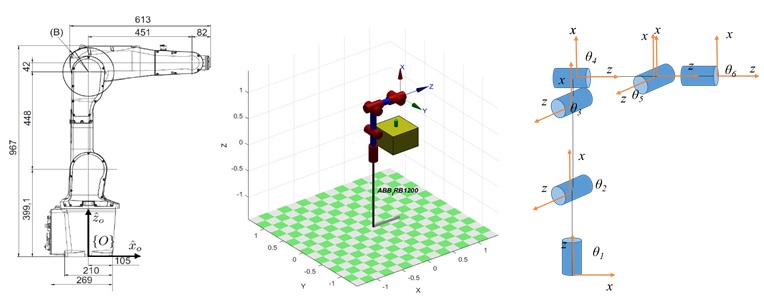
It described the kinematics and dynamics of robot model. It was resolved by robotic toolbox.
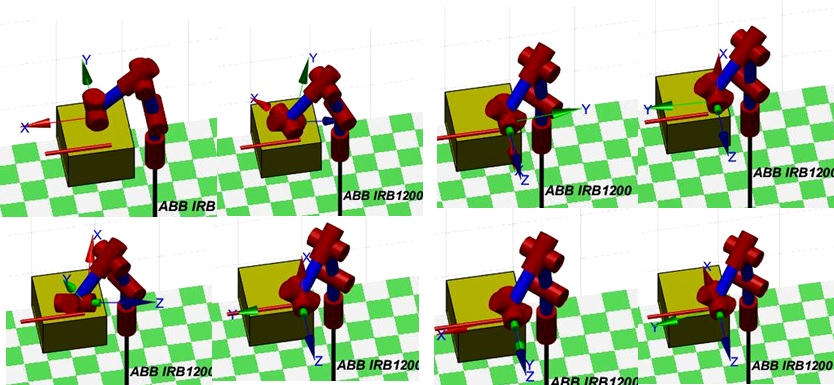
These figures showed how the manipulator moves and accomplishes the tasks.
You can read my final report paper. It was not complete form but you can check what I did and how I did.